Необходимость построения САУ, включающих большое число модулей с различными требованиями к связям между ними, обусловило создание многоуровневых (иерархических) систем сбора, обработки и передачи информации.
Сущность магистрально-модульного принципа построения систем — возможность комплектовать средства САУ из стандартных и конструктивно законченных модулей, совместимых по интерфейсу обмена.
Модули САУ по конструктивному признаку делятся на три уровня:
- Ml — плата установки электрорадиоэлементов и микросхем малой (МИС), средней (СИС), большой (БИС) и сверхбольшой (СБИС) интеграции;
- М2 — кассета, являющаяся типовым элементом замены (ТЭЗ) при ремонте системы и объединяющая несколько плат Ml в единый конструктив;
- МЗ — приборный шкаф, служащий несущей конструкцией кассет М2 прибора, одного или нескольких функциональных модулей (ФМ). Сложный ФМ может включать в себя несколько приборов третьего уровня МЗ.
Для обеспечения взаимодействия модулей необходима физическая среда. Она образуется путем использования пространства (эфира), либо материала (меди, световода), свойства которого обеспечивают распространение сигналов, передающих необходимую информацию. На основе физической среды создается канал — совокупность физической среды и каналообразующих средств (контроллеров для управления обменом информацией, устройств сопряжения с физической средой, осуществления контроля за передачей информации состоянием канала обмена и самоконтроля), связывающих модули одного уровня друг с другом. При необходимости повышения надежности, живучести и (или) пропускной способности модули одного уровня иерархии могут связываться не одним, а несколькими каналами обмена.
Совокупность каналов обмена одного уровня образует систему обмена, объединяющую модули в систему данного уровня иерархии и являющуюся центральным элементом этой системы.
Характерной особенностью создания современных САУ является широкая унификация технических решений модулей всех трех конструктивных уровней и, в первую очередь, унификация внутриприборных и внешних интерфейсов приборов и модулей. Этот подход должен учитывать как специфику приборов и модулей, накладывающую ряд ограничений на интерфейсы, так и главенствующую проблему сокращения оборудования каналов обмена и повышения надежности и живучести систем.
Стандартизации в интерфейсе обычно подлежат: форматы передаваемой информации; команды и состояния средств канала; состав и типы линий связи; алгоритм функционирования; передающие и приемные электронные схемы; параметры сигналов и требования к ним; конструктивные решения (включая нумерацию контактов в разъемах). Выбор интерфейса канала обмена определяется требованиями к системе обмена по обеспечению: требуемой функциональной связанности модулей с заданным быстродействием; высокой надежности передачи данных; долговечности и износоустойчивости оборудования; ремонтопригодности; учета возможности расширяемости системы; простоты схемных и конструктивных решений; минимизации стоимости, массы и габаритных размеров.
В зависимости от структуры системы обмена, конструктивного размещения и взаимодействия модулей можно, взяв за основу работу, выделить три уровня внутри приборного интерфейса: внутриплатные; внутрикассетные; межкассетные или внутриприборные.
Внешний интерфейс приборов и модулей делится на группы:
- специальные интерфейсы каналов связи с датчиками и исполнительными устройствами ФМ;
- унифицированные интерфейсы каналов обмена с локальными периферийными устройствами;
- унифицированные интерфейсы каналов межприборного обмена сосредоточенных систем;
- унифицированные интерфейсы каналов межмодульного обмена распределенных систем;
- унифицированные для всей АСУ интерфейсы межсистемного обмена.
Унифицированные интерфейсы связи с периферийными устройствами часто предоставляют разработчикам САУ возможность использовать стандартное периферийное оборудование. Разработан целый ряд стандартных плат сопряжения этих интерфейсов с внутриприборным интерфейсом. Несравненно более сложную проблему представляет унификация каналов обмена между приборами и ФМ. Здесь помимо обеспечения графика и надежности передачи приходится решать вопросы выбора оптимальной топологии связи и стратегии управления передачей, форматов сообщений, средств и методов повышения помехо- и отказоустойчивости, а также обеспечения расширяемости САУ.
Разделение внешних интерфейсов приборов на интерфейсы сосредоточенных вычислительных систем (СВС) и распределенных вычислительных систем (РВС) отражает соотношение времени передачи данных между приборами и времени обработки этих данных. РВС имеют территориально разнесенные модули. В данном классе систем выделяют два подкласса: глобальные РВС и локальные РВС. В глобальных РВС длина каналов связи измеряется сотнями и тысячами километров. Глобальные РВС (например, средства управления космическими объектами) представляют незначительный объем среди других систем и используют специфическую среду — радиоканал. Локальные РВС занимают промежуточное положение между СВС и глобальными РВС; длина каналов связи у них измеряется сотнями метров.
В распределенных системах управления применяются, как правило, последовательные каналы с одной линией связи, а в сосредоточенных — каналы с группой линий связи — шиной интерфейса.
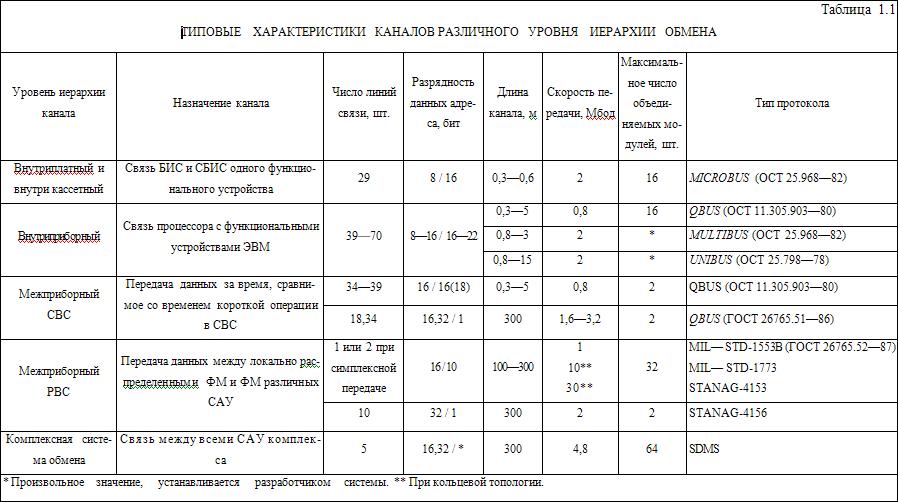
Типовые характеристики каналов различных уровней иерархии обмена данными приведены в табл. 1.1.
Одним из основных требований к каналам передачи данных является обеспечение живучести САУ, под которой подразумевается способность системы в целом выполнять свои функции при выходе из строя одного или нескольких ее блоков. Это требование может быть сформулировано как способность системы передачи информации осуществлять свои функции при выходе из строя (пробое, обрыве или логической неисправности) одного или нескольких ее абонентов. Одним из факторов, обеспечивающих живучесть каналов межмодульного обмена, является гальваническая развязка абонентов от линии передачи информации.